ONGOING PROJECTS
AI-Enabled
EV Integration System for Power
Management in Smart Grid
A Virtual Power Plant (VPP)
is a network of distributed power
generating units, flexible power
consumers, and storage systems. A
VPP balances the load on the grid
by allocating the power generated
by different linked units during
peri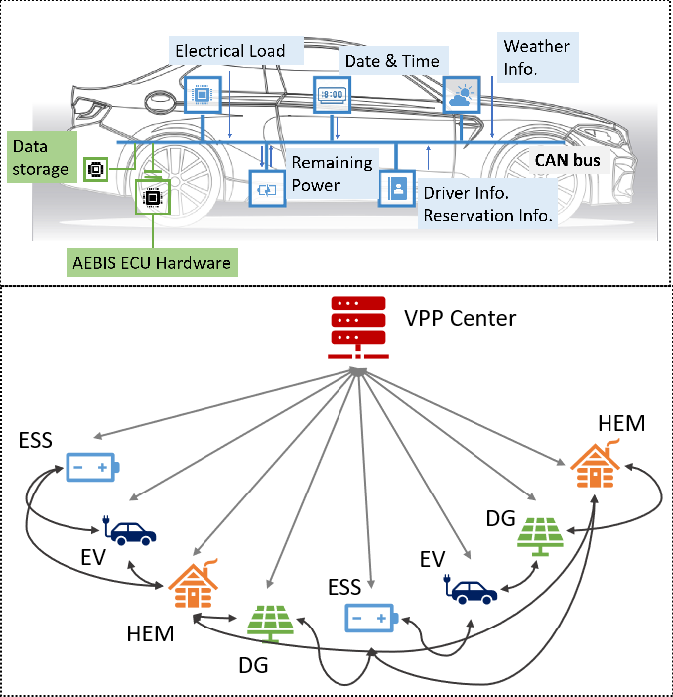 ods of peak load.
Demand-side energy equipment, such
as Electric Vehicles (EVs) and
mobile robots, can also balance
the energy supply-demand when
effectively deployed. However,
fluctuation of the power generated
by the various power units makes
the supply power balance a
challenging goal. Moreover, the
communication security between a
VPP aggregator and end facilities
is critical and has not been
carefully investigated. ods of peak load.
Demand-side energy equipment, such
as Electric Vehicles (EVs) and
mobile robots, can also balance
the energy supply-demand when
effectively deployed. However,
fluctuation of the power generated
by the various power units makes
the supply power balance a
challenging goal. Moreover, the
communication security between a
VPP aggregator and end facilities
is critical and has not been
carefully investigated.
In this project, we collaborate
with Aizu Computer Science
Laboratories, Inc. and Banpu Japan
to develop an AI-enabled,
blockchain-based electric vehicle
integration system for power
management in a smart grid
platform based on EV and solar
carport. We have developed a
low-power AI-chip and various
software tools for EV charge
prediction, in which the EV fleet
is employed as a consumer and as a
supplier of electrical energy.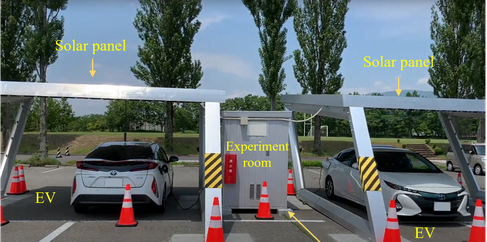
- AEBIS
Project Press Release [オ
フグリッド蓄電 ソーラーカーポート実証研究を開始]
Aizuawakamatsu
plus; YouTube
- Z.
Wang, M. Ogbodo, H. Huang,
C. Qiu, M. Hisada,
A. Ben Abdallah, "AEBIS:
AI-Enabled
Blockchain-based Electric
Vehicle Integration System for
Power Management in Smart
Grid Platform," IEEE
Access, vol. 8, pp.
226409-226421, 2020,
doi:10.1109/ACCESS.2020.3044612.
- Huakun
Huang, Mark Ogbodo, Zhishang
Wang, Chen Qiu,
Masayuki Hisada,
Abderazek Ben Abdallah,
”Smart Energy Management
System based on
Reconfigurable AI Chip
and Electrical
Vehicles”, 2021 IEEE
International Conference
on Big Data and Smart
Computing (BigComp
2021), January 17-20,
2021, Jeju Island, Korea
- Patent:
[特 許第6804072 号]
(2020.12.04) ベン
アブダラ アブデ ラゼク,
久田雅之, ''Virtual
Power Platform Control
System [仮 想 発電所制
御システム]'', 特 願
2020-033678号
(2020.02.28)
 Multi-modal
Prosthetic Hand with Tactile
Sensing Multi-modal
Prosthetic Hand with Tactile
Sensing
Current
body-powered or
myoelectric upper-limb
prostheses do not afford
amputees with performance
and high-quality control
due to the lack of sensory
feedback. From another
hand, the use of robot-arm
in various fields of human
endeavour has increased
over the years, and with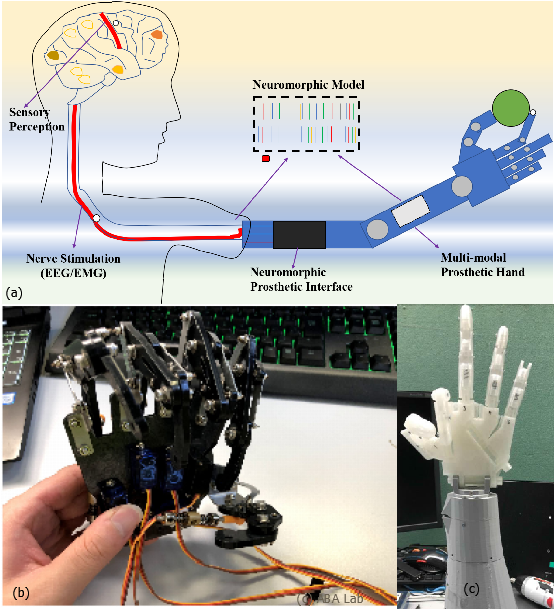 recent
advancement in artificial
intelligence enabled by
deep learning, they are
increasingly being
employed in medical
applications (i.e.,
assistive robots for
paralyzed patients,
welfare robots, etc.),
However, most robotic arms
unlike living agents t hat
combine different sensory
input to accurately
perform a complex task,
use uni-sensory input
which affect their
accuracy. recent
advancement in artificial
intelligence enabled by
deep learning, they are
increasingly being
employed in medical
applications (i.e.,
assistive robots for
paralyzed patients,
welfare robots, etc.),
However, most robotic arms
unlike living agents t hat
combine different sensory
input to accurately
perform a complex task,
use uni-sensory input
which affect their
accuracy.
We
investigate advanced
prosthetic hands and robot
arms with sensorimotor
integration and tactile
sensing. The novel
prosthetic is based on
biological signal
discrimination with
neuromorphic circuits to
restore hand function
movement for amputations
or neurological
disorders. Using our
neuromorphic circuits and
system, we aim to develop
solutions to improve the
performance and control of
upper-limb prosthetics.
The solution encodes
sensory information (like
pain or touch) as
electrical stimulation
pulses to restore natural
sensory perception.
- Mark
Ogbodo, Abderazek Ben
Abdallah, ''Study of a
Multi-modal
Neurorobotic
Prosthetic Arm Control
System based on
Recurrent Spiking
Neural Network,''
ETLTC2022,
January 25-28, 2022
- Yamato
Saikawa, Abderazek
Ben Abdallah, ''Study
of Deep Learning-based
Hand Gesture
Recognition Toward the
Design of a
Low-cost Prosthetic
Hand'', ETLTC2022,
January 25-28, 2022
- Masaki
Watanabe,, Abderazek
Ben Abdallah, ''A
low-cost Raspberry
PI-based Control
System for Prosthetic
Hand,''
ETLTC2022, January
25-28, 2022
- Sinchhean
Phea, Abderazek Ben
Abdallah, ''Design of
an Affordable
3D-printed Open-Loop
Prosthetic Hand with
Neural Network
Learning EMG-Based
Manipulation,''
ETLTC2022,
January 25-28, 2022
Robust Brain-inspired
Cross-Paradigm System
The
goal of this project to
research and implement an
adaptive, low-power
spiking neural network
system in hardware (NASH)
based on our earlier
developed OASIS
communication network.
NASH implements the
followings features (1)
efficient adaptive
configuration method which
enables reconfiguration of
different SNN parameters
(spike weights, routing,
hidden layers, topology,
etc.), (2) a mixture of
different deep NN
topologies, (3) an
efficient fault-tolerant
multicast spike routing
algorithm, (4) Efficient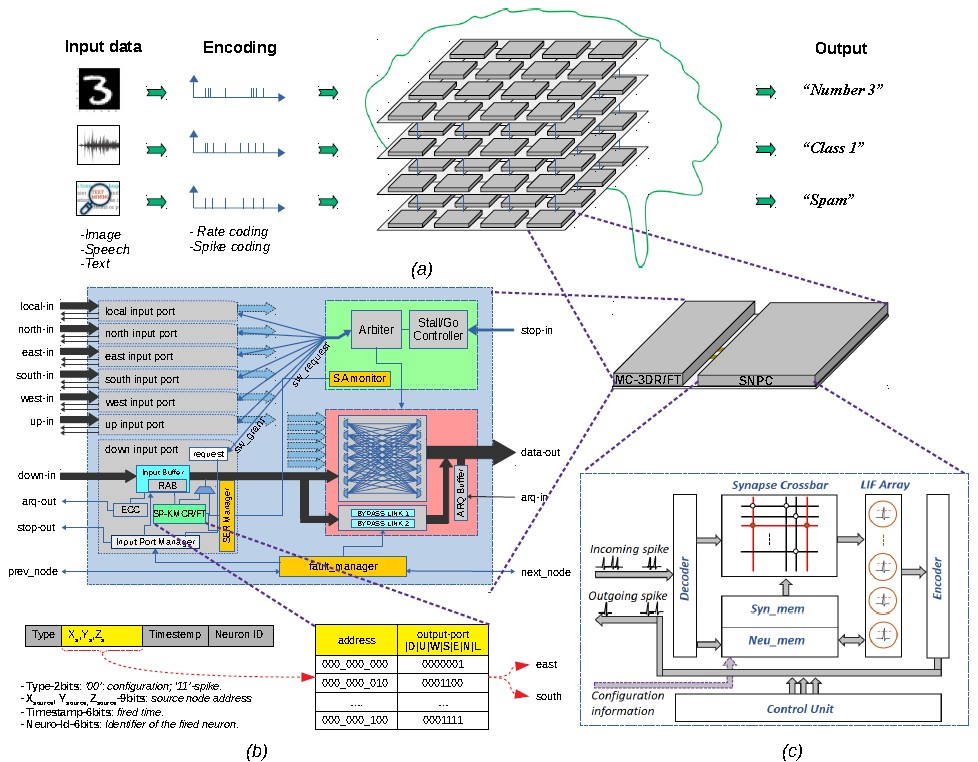 on-chip learning
mechanism. To demonstrate
the performance of NASH
system, an FPGA
implementation shall be
developed and interfaced
to a small drone. Besides,
a VLSI implementation
shall be established.
on-chip learning
mechanism. To demonstrate
the performance of NASH
system, an FPGA
implementation shall be
developed and interfaced
to a small drone. Besides,
a VLSI implementation
shall be established.
- Abderazek
Ben Abdallah, Khanh
N. Dang, ''Toward
Robust Cognitive 3D
Brain-inspired
Cross-paradigm
System,'' Frontier
in Neuroscience
15:690208, doi:
10.3389/fnins.2021.690208
- Khanh
N. Dang, Nguyen Anh Vu
Doan, Abderazek Ben
Abdallah “MigSpike:
A Migration Based
Algorithm and
Architecture for
Scalable Robust
Neuromorphic
Systems,” IEEE
Transactions on Emerging
Topics in
Computing (TETC),
12/2021. DOI:
10.1109/TETC.2021.3136028
- O.
M. Ikechukwu, K. N. Dang
and A. Ben Abdallah,
''On the Design of a
Fault-Tolerant Scalable
Three Dimensional
NoC-Based Digital
Neuromorphic System With
On-Chip
Learning,'' IEEE
Access, vol. 9, pp.
64331-64345, 2021, doi:
10.1109/ACCESS.2021.3071089
- The
H. Vu,Yuichi Okuyama,
Abderazek Ben Abdallah,
'' Comprehensive
Analytic Performance
Assessment and K-means
based Multicast Routing
Algorithms and
Architecture for 3D-NoC
of Spiking
Neurons.,'' ACM
Journal on Emerging
Technologies in
Computing Systems
(JETC), Vol. 15, No. 4,
Article 34, October
2019. doi:
10.1145/3340963
- Patent:
Abderazek Ben Abdallah,
The H. Vu, Masayuki
Hisada, ''Neural
Computing Architecture,
Fault-tolerant
Algorithm, and Design
M1ethod for Spiking
Neural
Networks,'' 特
願2019-124541 (pending)
|
|
|
